Buch • Quadrocopter Bau
Quadrocopter Selbstbau
Bitte daran denken, dass der Blogbeitrag aus dem Jahr 2014 stammt und das Buch auch. Danke.
Vor einiger Zeit (also im Jahr 2014) wurde in meinem Freundeskreis das Thema Multicopter aufgegriffen und es wurde sich intensiv mit der Materie beschäftigt. Ich habe vor vielen Jahren gerne Modellbau betrieben (Verbrennerbuggys, Schiffsmodelle, Uboote usw.), so dass die Thematik nicht neu für mich war. Die Einfachheit der Multicopter ist interessant und mit den heutigen technologischen Möglichkeiten kann nicht viel schief gehen, wenn man so etwas nachbauen möchte. Ich nutze ich diese kleinen Dinger mittlerweile in verschiedenen Bereichen, um Zeit zu sparen und die Umwelt zu schonen.

Quadrocopter beim Testflug
Wir haben zu diesem Thema ein Buch geschrieben und ich kann einige Fotos aus diesem Buch hier verwenden, da ich die technische Umsetzung des Multicopterbaus für diese Buch betrieben habe. Leider kann ich nicht alle Informationen online stellen, denn dann wäre dieses Buch wohl überflüssig und das wäre nicht ok. Ich habe den Quadrocopter gebaut und er fliegt in meinen Augen super. Ein kleines Testflugvideo ist ganz unten zu sehen.

Buch anklicken (Amazon)
Trotzdem werde ich viele Bilder und Informationen in den nächsten Beiträgen hier veröffentlichen, so dass man einen relativ umfangreichen Einblick erhalten kann.
Folgende Dinge gibt es bei einem Selbstbau zu beachten:
- Auswahl und Berechnung der Komponenten des Quadrocopters
- Bau des Frames
- Motoren und Regler (inkl. Akku)
- Flugsteuerung für den Quadrocopter
- Fernsteuerung
Was ist ein Quadrocopter?
Halt so ein Teil mit vier (deshalb quadro) Motoren, die das Ding wie ein Hubschrauber nach oben ziehen. Der Hubschrauber braucht ja noch einen Ausleger zum gegensteuern, damit er sich nicht dreht (jedenfalls bei einigen Modellen) und zum Kurven fliegen. Deshalb ist ein Hubschrauber auch relativ komplex und hat viele mechanische Bauteile. Nicht so der Quadrocopter, der außer den Motoren und den darauf montierten Propellern keine mechanischen Bauteile besitzt. Daher ist der Selbstbau auch relativ einfach, wenn man einige Dinge beherzigt. leider liegt der Teufel im Detail: Nur eine falsch angeschlossenes Kabel oder eine verdrehte GPS-Antenne führen unweigerlich zum Absturz und damit oft auch zum Crash der fliegenden Untertasse. Damit dass nicht passiert, sind halt die Details in dem o.g. Buch zusammen gefasst worden. Wer also auf Nummer sicher gehen will – und nicht trail & error liebt – der kann auf das Buch bei einem Selbstbau zurück greifen. So genug Werbung gemacht – auf geht es zum Bau. Eine Sache noch: Es gibt auch Hexacopter, Oktocopter, Dodekacopter, Tricopter usw., je nachdem wie viele Motoren dran geschraubt wurden. Weiterhin gibt es da noch unterschiedliche Bau- und Flugformen, je nachdem, wie die Motoren angeordnet sind.

fertig aufgebauter Quadrocopter
Auswahl und Berechnung der Komponenten
Viele Teile gibt es nicht aber alle sind voneinander abhängig und müssen funktional zusammen passen. Daher müssen die Komponenten aufeinander angestimmt sein. Folgende Fragen sollten zu Beginn geklärt sein:
- Wie groß und schwer soll der Copter sein?
- Was will ich damit anfangen?
- Was darf alles zusammen kosten?
Diese Fragen hängen wiederum zusammen – einen großen Copter für wenig Geld gibt es nicht und große schwere Copter sind oft nicht agil, falls ich Kunstflugambitionen vorgesehen habe. Wenn ich nur Freude am gemütlichen umherfliegen habe, dann muss der Copter nicht allzu agil sein, wenn ich Filmaufnahmen machen möchte, sollte er schon das ganze Kameragedöns tragen können. Versicherungstechnisch sollt man unter 5kg Gesamtgewicht bleiben, sonst wird es teuer und kompliziert. 5kg Gesamt- oder besser Abfluggewicht sind aber schon sehr viel und auch sehr teuer. Ein kleiner Copter für den gemütlichen Rundflug mit agilen Einlagen wiegt ca. 1kg – je nach Bauart mehr oder weniger. Das wäre auch ein vernünftiges Gewicht, für einen Einsteiger. Ist die Größenordnung halbwegs klar, kann es an die genaue Auswahl der Komponenten gehen, die ein Copter benötigt:
- Frame (das Grundgestell)
- Motoren, Regler und Propeller (Antrieb), Akku, Kabel
- Elektronik (Flugsteuerung, GPS usw.)
- Funkfernsteuerung

montierter Motor und Propeller an einem Copterarm
Man muss dazu das Abfluggewicht grob festlegen (hier z.B. 1,2kg) und danach die Motoren auswählen. Die Motoren müssen im Standschub, also beim schweben, ca. 50 Prozent ihrer Leistung abgeben. Der Motor braucht dazu einen Propeller, welche eine Größe und eine Steigung hat. Die Motoren sind immer für bestimmte Propellergrößen und Steigungen ausgelegt. Jeder Motor muss also 300 Gramm im Schwebeflug tragen bei 50 Prozent Leistungsabgabe. Die Motorenhersteller haben dazu entsprechende Listen. Zu meinem Motor gehört dann z.B. ein 12-Zoll-Propeller mit einer Steigung von 5. Der Motor benötigt eine bestimmte Spannung und zieht bei Maximalbelastung einen Strom. Dadurch bestimme ich die möglichen Akkuvarianten. Nach Auswahl des Motors suche ich also den Akku heraus, ein Lipo-Akku mit 11,4 Volt Spannung und einer Kapazität von 5 Ah. Andere Varianten sind möglich – es kommt immer auf das Gewicht an. Der Akku wiegt ca. 400 Gramm. Der Regler – quasi mein Gaspedalumsetzer – steuert die Leistungsabgabe des Motors und muss zur Maximalstromstärke passen. Die Motoren ziehen in dem o.g. Fall ca. 19 Ampere, so dass ein 20A-Regler ausreichen würde.
Um den Copter in der Luft steuern zu können, ist eine Flugsteuerung (flight control) notwendig, welche mit Sensoren bestückt ist, die verhindern, dass der Copter sonst wo hinfliegt. Ein Computer berechnet anhand der eingebauten Kreisel und Beschleunigungssensoren eine stabile Fluglage – sonst wäre fliegen nur sehr schwer möglich aber machbar. Zusätzlich kann man noch eine GPS-Antenne einbauen, welche den Komfort des Fliegens in der Anfangsphase merklich steigert und zusätzliche Funktionen bietet, wie das selbstständige Zurückfliegen und landen bei Funkabbruch. Als Einsteiger wählt man eine einfach einzustellende komfortable Flugsteuerung, welche man auch als Nicht-ITler in den Griff bekommt. Kostet etwas mehr, schont aber die Nerven.
Für den Frame, also das Grundgestell muss man einen Wert annehmen. Dieser kann nur aus der Erfahrung heraus angegeben werden – die Größenordnung bei einem Holz-Alu-Frame wäre da ca. 250 Gramm.
Hat man die Teile grob ausgewählt, sollte das Ganze noch einmal über eine Software nachgerechnet werden. Hier ist z.B. die Online-Software ecalc.ch sehr hilfreich, da alle Werte durchgetestet werden können. Wer alle Hersteller in diesem Tool nutzen will, muss aber 5 Euro löhnen. Lohnt sich aber.
Nun stehen die Komponenten fest und der nächste Schritt kann begonnen werden.
Bau des Frames
Wer schon mal Laubsägearbeiten gemacht hat, kann auch den Frame eines Multicopters bauen, solange man sich an die Materialien Sperrholz und Aluvierkant hält. Man braucht eine Zeichnung, welche die Maße hergibt und sägt dann Ober- und Unterteil aus, längt die Vierkantstäbe ab, bohrt ein paar Löcher und baut das Ganze zusammen. Das dauert nicht länger als einen Nachmittag. Ein wenig Lack verschönt die Aktion dann noch.

fertig gebauter Frame
Auf diesen Frame werden dann die Motoren, die Regler, die Flugsteuerung, die Kabel, der Empfänger, der Akku und die GPS-Antenne montiert. Hier gibt es Details zu beachten – würde hier zu weit führen – am Ende steht der Copter eigentlich schon fertig da. Nur so viel: die Regler müssen oft angelernt werden und sollten mit der Firmware SimonK ausgestattet sein. Als Flugsteuerung für Einsteiger hat sich die Naza-M light bewährt, die sich auch mit GPS ausrüsten lässt.
Flugsteuerung
Hier wird es das erste Mal etwas tricky, denn die Flugsteuerung muss genau auf die Komponenten eingestellt werden. Nutzt man beispielsweise die Naza-M light, kann man eine komfortable Software zum Einstellen aller Werte benutzen und kann auch die GPS-Funktionen einfach integrieren. Andere Steuerungen müssen entweder erst zusammen gebaut werden (z.B. Aufrüstung mittels Sensoren) oder die Einstellung erfolgt mühselig über Script-Änderungen.
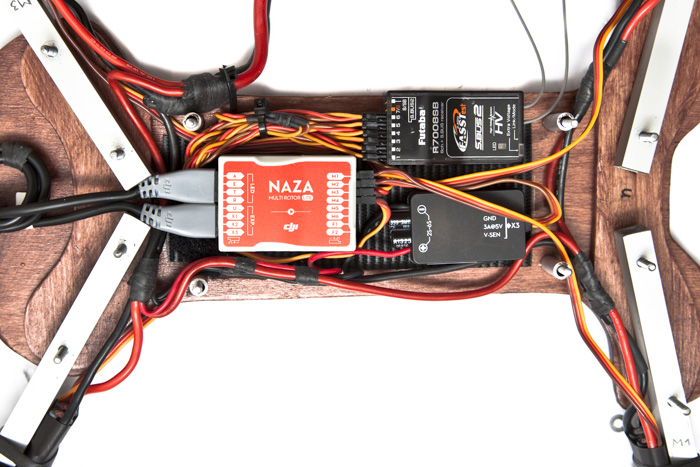
Frame mit kompletter Elektronik – Flugsteuerung, Empfänger, Spannungsversorgung
Funkfernsteuerung
Modellbauer brauchen Funkfernsteuerungen, damit sie vom Boden aus ihre Modelle befehligen können. Die Auswahl ist schier unendlich und auch preislich gibt es große Unterschiede. Für den Copter braucht man 6 Kanäle, um alle Funktionen ansteuern zu können. Will man später aufrüsten, sollte man gleich zu einer 8-, 10- oder 12-Kanal-Funkfernsteuerung eines Markenanbieters greifen. Der Empfänger – funkt meist im 2,4 GHz-Bereich – muss in den Copter integriert werden, d.h. alle zu steuernden Funktionen müssen an den jeweiligen Kanal angebunden werden:
- rechts/links fliegen – also seitliches kippen (Rollachse)
- vor/rück fliegen also kippen nach vorn/hinten (Pitch oder Nickachse)
- drehen um die Achse (Yawachse)
- steigen/sinken (vertical)
- Control Mode (Umschaltung zwischen Sensor/GPS-Flug)
- Orientation Control (wie der Copter auf Flugbefehle reagieren soll)

moderne Funkfernsteuerung T14SG von Futaba mit 14 Kanälen
Moderne Anlagen vermeiden die ganze Verkabelung zum Empfänger durch ein einziges Buskabel, z.B. bei Futaba durch den SBUS. Das wird dann übersichtlicher und vermeidet Fehler bei der Zuordnung. In der Funkfernsteuerung müssen dann die einzelnen Kanäle den Funktionen zugeordnet und bei Bedarf eingestellt werden. Außerdem werden die Knüppelstellungen und andere Grundeinstellungen zusammen mit der Flugsteuerungssoftware eingelernt. Ist die Funkfernsteuerung eingestellt und an den Quadrocopter angebunden kann es zu den ersten Testflügen gehen.
Testflug
Nach dem Einstellen der Parameter kann man sich auf eine weit abgelegene ruhige, möglichst höher bewachsene Wiese begeben, um den ersten Test zu absolvieren. Vorher würde ich noch eine Flugmodellversicherung abschließen, denn die Schäden können schon größer werden, wenn so ein Teil das nächste Auto zerbröselt oder herumstehende Leute ins Krankenhaus bringt. Also möglichst ohne Publikum beginnen und auch weit weg von jeglichen Gegenständen (Masten, Häuser, Flüsse, Seen usw.). Vor dem ersten Flug das Modell mit einem Gurt an eine große Kiste binden und alle Funktionen ausprobieren bei laufenden Motoren. Wenn man alles richtig gemacht hat, dann kommt der Copter auch wieder zurück und liegt nicht im nächsten See zwischen den Karpfen.

Testflug erfolgreich




Liebe Grüße Hunter Matze tv von YouTube schöner copter ! Bissel klein aber schön ! Wie ich hier gerade auf deinem Blog sehe bist genauso vielseitig unterwegs wie ich im Bereich bauen basteln ! Aus welcher Region kommst eigendlich ! Liebe Grüße aus Wittenberge
Moin Matze, danke und schöne Grüße nach Wittenberge! Komme von der Ostsee, also in Mecklenburg. 😉 Grüße Tom